





标题:实时控制舵机转速:原理与实现方法详解
文章:
随着自动化技术的不断发展,舵机在机器人、无人机、模型制作等领域得到了广泛应用。舵机能够精确地控制机械臂或模型舵盘的转动角度,实现精准的动作控制。而实时控制舵机转速,则是实现复杂动作和精确控制的关键。本文将详细介绍实时控制舵机转速的原理与实现方法。
一、舵机转速控制原理
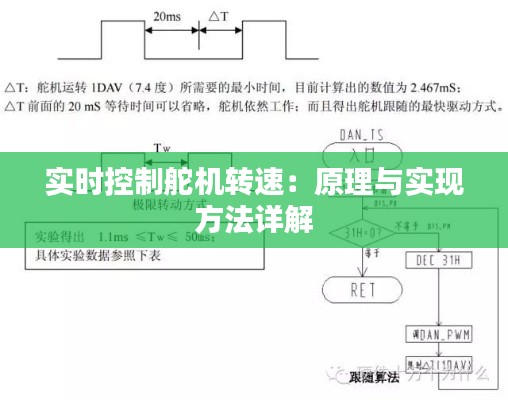
舵机转速控制主要基于PWM(脉冲宽度调制)技术。PWM是一种通过改变脉冲宽度来控制电子设备输出功率的方法。在舵机控制中,通过调整PWM信号的占空比,可以实现对舵机转速的实时控制。
- PWM信号生成
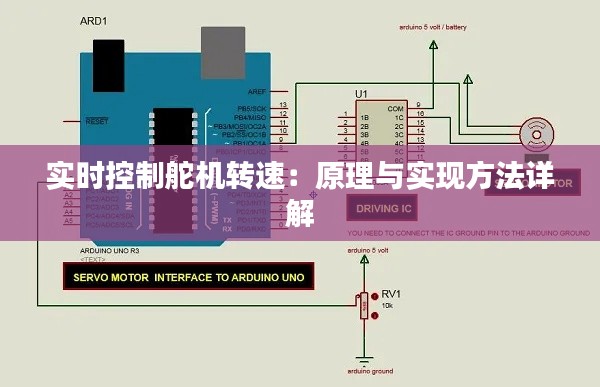
PWM信号生成器负责产生PWM信号。在舵机控制系统中,PWM信号生成器通常由微控制器(如Arduino、STM32等)实现。通过编程设置PWM信号的频率和占空比,可以控制舵机的转速。
- PWM信号传输
生成的PWM信号需要传输到舵机模块。传输方式主要有以下几种:
(1)有线传输:通过舵机控制模块的PWM输出端口,将PWM信号传输到舵机模块。
(2)无线传输:通过无线模块(如蓝牙、Wi-Fi等)将PWM信号传输到舵机模块。
- 舵机响应
接收到的PWM信号被舵机模块中的解码器解码,解码器根据PWM信号的占空比计算出舵机需要转动的角度。然后,舵机内部的电机驱动电路根据计算出的角度驱动电机转动,实现转速控制。

二、实时控制舵机转速的实现方法
- 采用微控制器实现PWM信号生成
使用微控制器(如Arduino、STM32等)编程,生成PWM信号。通过调整PWM信号的频率和占空比,实现对舵机转速的实时控制。
- 采用专用舵机控制模块
使用专用舵机控制模块(如PCA9685、SG90等)实现PWM信号生成。这些模块具有丰富的接口和功能,可以方便地实现舵机转速控制。
- 采用无线通信技术实现远程控制
通过无线通信技术(如蓝牙、Wi-Fi等)实现远程控制舵机转速。用户可以通过手机、电脑等设备发送PWM信号,实现对舵机的实时控制。
- 采用图像识别技术实现智能控制
结合图像识别技术,实现对舵机的智能控制。例如,在无人机避障过程中,通过图像识别技术检测前方障碍物,实时调整舵机转速,实现避障。
三、总结
实时控制舵机转速是自动化技术中的重要应用。本文介绍了舵机转速控制原理及实现方法,包括PWM信号生成、传输和响应等环节。通过采用微控制器、专用舵机控制模块、无线通信技术和图像识别技术等手段,可以实现实时、精确的舵机转速控制。在实际应用中,可以根据具体需求选择合适的方法,提高舵机控制系统的性能和可靠性。
转载请注明来自南京强彩光电科技有限公司,本文标题:《实时控制舵机转速:原理与实现方法详解》





 苏ICP备18007744号-2
苏ICP备18007744号-2